gross2004enrichment
Enrichment and foodchain stability: the impact of different forms of predator–prey interaction
We propose a simple model of an ecological foodchain of arbitrary length. The model is very general in nature and describes a whole class of foodchains. Using the methods of qualitative analysis the model's stability can be analysed without restricting the predator–prey interaction to any specific functional form. The model can therefore be used to study the effect of different functional forms on the stability of the foodchain. We demonstrate that the stability of steady states may strongly depend on the exact functional form of the interaction function used. It is shown that a class of interaction functions exists, which are similar to the widely used Holling functions but bestow radically different stability properties upon the model. An example is shown in which enrichment has a stabilizing effect on the foodchain. By contrast enrichment destabilizes steady states if Holling functions are used.
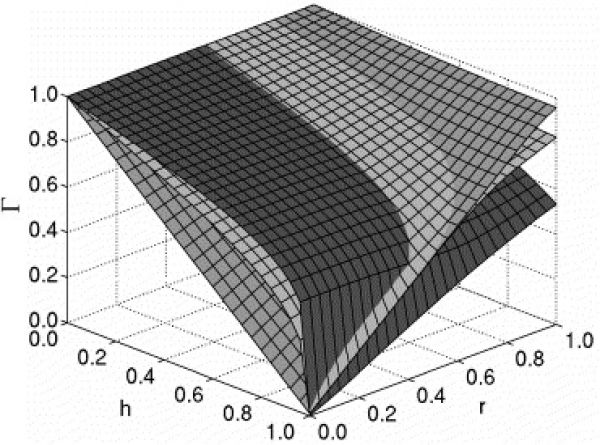
Figure 1: The bifurcation diagram of the six-trophic foodchain contains three Hopf bifurcation surfaces.