ghafourian2020wireless
Wireless localization with diffusion maps
In the Wireless Localization Matching Problem (WLMP) the challenge is to match pieces of equipment with a set of candidate locations based on wireless signal measurements taken by the pieces of equipment. This challenge is complicated by the noise that is inherent in wireless signal measurements. Here we propose the use of diffusion maps, a manifold learning technique, to obtain an embedding of positions and equipment coordinates in a space that enables coordinate comparison and reliable evaluation of assignment quality at very low computational cost. We show that the mapping is robust to noise and using diffusion maps allows for accurate matching in a realistic setting. This suggests that the diffusion-map-based approach could significantly increase the accuracy of wireless localization in applications.
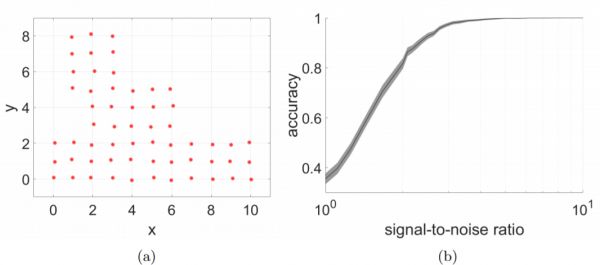
Figure 1: Performance in a realistic scenario. Shown are node positions (a) and the achieved accuracy in terms of signal-to-noise-ratio (b). The curve is a mean over 100 realizations of the noise. The area around the curve represents a 99% confidence interval. In such realistic scenarios the method achieves perfect or near perfect matching results even at low signal-to-noise ratios of around 5.